






标题:GeoClaw 开源框架正式发布 | UrbanComp Lab
传统地理信息分析工具长期面临一个核心矛盾:空间数据蕴含着城市运行的丰富规律,但掌握 GIS 软件却需要漫长的学习周期。研究者往往要花费大量精力记忆函数参数、调试工具链,才能真正投入到空间问题本身的思考。
GeoClaw 的出发点,正是打破这道门槛。
UrbanComp Lab今日开源两套 GeoClaw 框架,支持Claude、ChatGPT、Gemini以及Qwen API,以"自然语言驱动 GIS"为核心理念,为城市计算与地理信息科学研究者提供一个兼具易用性与可扩展性的智能空间分析平台。
自然语言交互:说人话,做 GIS
GeoClaw 的核心突破,是让研究者直接用中文下达空间分析指令,无需记忆任何 API 函数名:
geoclaw-claude ask "下载武汉市医院数据并做1公里缓冲区"
geoclaw-openai nl "用武汉市做选址分析,前20个,出图" --execute
系统内置双模式解析引擎:有网络时调用大模型理解语义,支持复杂意图与多步流水线;无 API Key 时自动降级为本地规则解析,离线环境同样可用。遇到低置信度的模糊指令,系统会主动向用户确认,确保分析意图准确无误。
支持操作涵盖缓冲区分析、空间叠加、最近邻、核密度估计、等时圈、最短路径、坐标系转换、OSM 数据下载与交互制图,覆盖城市空间研究的主要分析场景。
Skill 可扩展系统:像插件一样扩展分析能力
参考 QGIS Processing Framework 的设计理念,GeoClaw 提供了一套轻量级的 Skill 脚本系统,让每位研究者都能将自己的分析流程封装为可复用的模块:
编写一个 Python 函数,定义元数据,调用 ctx.ask_ai() 嵌入 AI 解释能力,一行命令安装并运行。内置 Skill 已覆盖医院覆盖分析、城市区位分析、选址优化等常见场景;自定义 Skill 同样可以接入大模型,实现"空间计算 + AI 解释"的一体化输出。
这一机制让 GeoClaw 不止是一个工具集,而是一个可以持续生长的分析生态。
智能体记忆系统:让经验跨任务积累
GeoClaw 内置两层记忆架构,赋予系统真正的"学习"能力:
- 短期记忆:会话内缓存中间图层,记录操作序列与耗时,支持多轮对话中图层上下文的自动保持。
- 长期记忆:每次任务结束自动复盘,将操作路径、成功率、失败原因与分析结论持久化写入本地知识库,跨会话保留。
研究者可随时检索历史经验,系统也会在后续任务中自动参考已有知识。用得越多,GeoClaw 对你的研究语境理解越深。
单算法操作:精准控制每一步
除了自然语言入口,GeoClaw 同样支持直接调用单个空间算法,适合需要精细控制每个参数的工程场景:
geoclaw-openai operator --algorithm native:buffer --param INPUT=hospitals.geojson --param-json DISTANCE=1000
Python API 同样保持完整开放,缓冲区、核密度、等时圈、栅格分析等函数均可独立调用,完全向下兼容,方便集成到现有研究管线中。
双平台,灵活选择
两套框架并行维护,研究者可根据实际条件灵活选用:
| 特性 | GeoClaw_Claude | GeoClaw-OpenAI |
|---|---|---|
| 许可证 | MIT | AGPL-3.0 |
| 定位 | 轻量级 Python 城市地理信息分析工具集 | 基于 QGIS Processing 的工程级制图管线 |
| 适用场景 | 日常研究分析、快速集成、二次开发 | 批量生产、标准化建模、规范工程输出 |
| 底层依赖 | 原生 Python 环境 (spatial_ops, raster_ops) | QGIS 底层能力 (qgis_process) |
两套框架共享相同的核心设计理念,能力对齐,文档完整。在最新的稳定版(v2.3+)中,两者均实现了多 LLM Provider 支持(兼容 OpenAI、Claude、Gemini、Qwen 等),并配备了相同的自动上下文压缩机制。
开发背景与技术深度剖析
核心作用
GeoClaw 是一套面向科研和工程团队的智能地理空间分析与制图工具链。它的核心作用是将大语言模型(LLM)的推理能力与专业的 GIS 处理引擎强耦合,让用户能够通过 “自然语言” 直接驱动复杂的空间数据分析。从基础的数据加载、区位与选址分析,到基于 Track-Intel 的人类移动性(Mobility)轨迹计算,再到最终的地图制图输出与 QGIS 工程文件沉淀,GeoClaw 提供了一条高度自动化的全流程流水线。
技术路线与愿景
GeoClaw 框架诞生于城市计算与 GIS 分析门槛高、传统软件操作繁琐且工具链严重割裂的背景下。其重要意义在于将大语言模型与专业地理分析深度融合,实现了从“人工点选界面”到“自然语言智能驱动”的范式革命。
该框架直击科研与工程团队在空间数据流水线不连贯、复杂轨迹计算繁杂以及历史分析经验难以结构化沉淀的核心痛点。在技术路线上,通过长短期记忆(Memory)存档与多维向量检索系统构建"AI 大脑”,底层则灵活依托轻量级原生 Python 组件或专业的 qgis_process 引擎作为双轨执行底座。
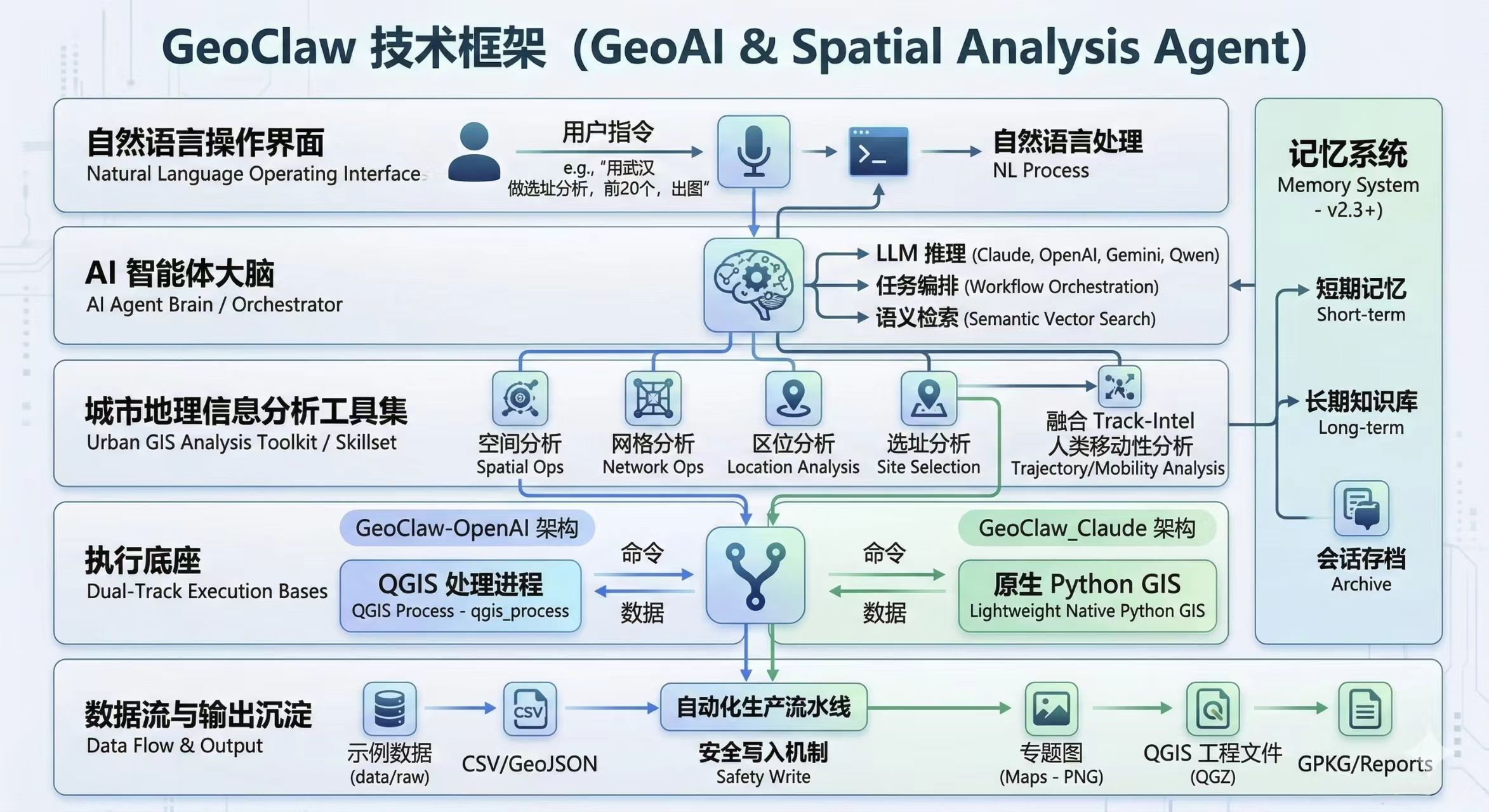
展望未来 ,GeoClaw 有望演进为连接复杂多智能体系统与数字孪生的超级“空间分析 Agent",在城市规划、智能交通调度、商业微观选址等领域实现高度自动化与极具深度的空间智能决策。
🌐 欢迎同行共建
GeoClaw 的愿景,是推动"自然语言 × 空间智能"成为地理信息科学的新范式。我们相信,降低工具门槛,才能让更多研究者聚焦于真正重要的空间问题。
目前两套框架均已完整开源,欢迎 Star、Fork、提交 Issue,或贡献你自己的 Skill 脚本。我们期待与更多城市计算、GIS、城乡规划、交通地理领域的同行一起,共同发展这个方向。
资源链接
UrbanComp Lab @ 中国地质大学(武汉)
Q.E.D.