










Breaking the black box: an interpretable machine learning model for global terrorism forecasting
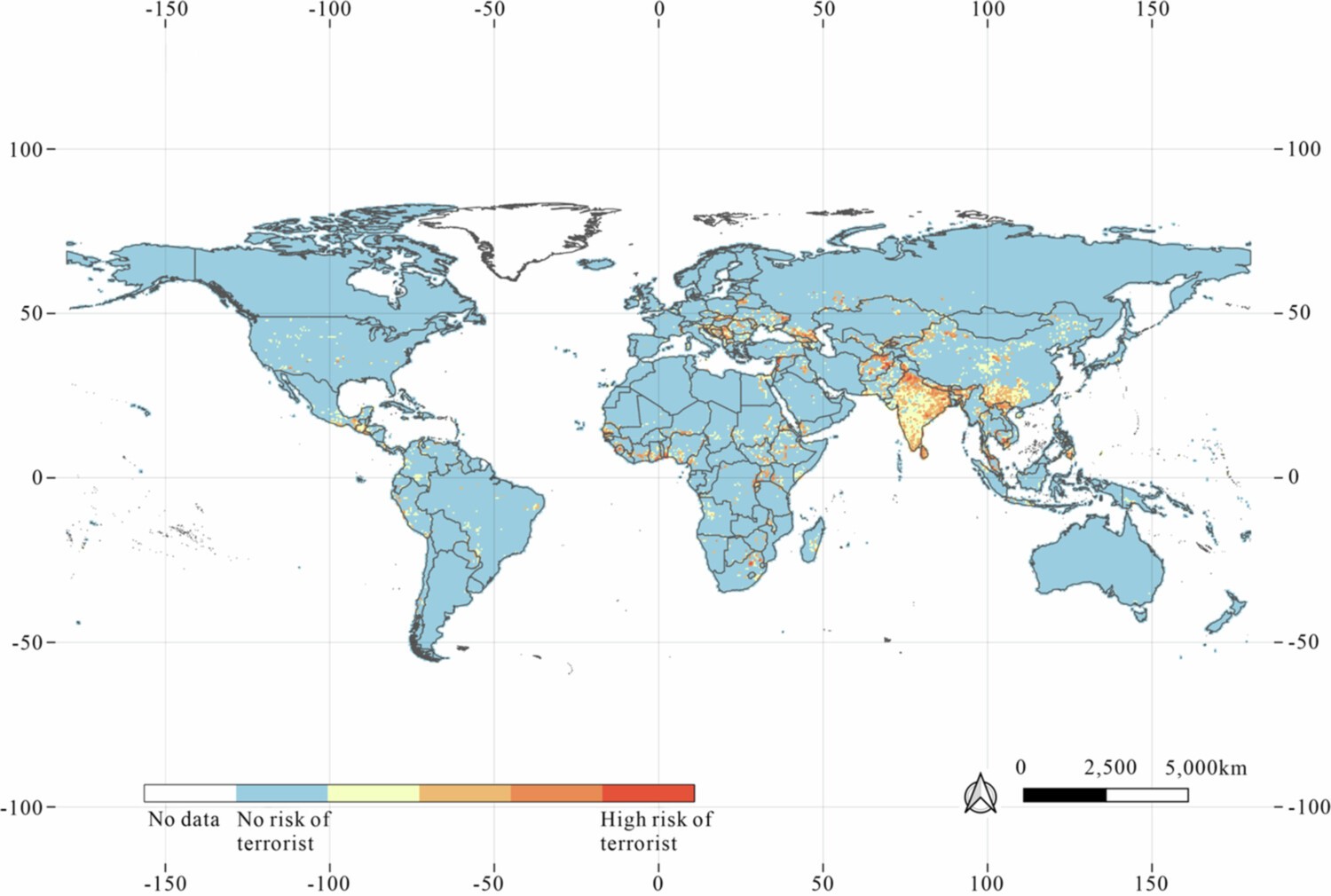
Terrorist attacks significantly threaten a nation’s stability, prosperity, and social cohesion. Therefore, predicting terrorist attacks and identifying their underlying drivers are crucial for formulating effective counterterrorism strategies. Existing studies often prioritize either temporal or spatial dimensions, while their interplay and specific socioeconomic drivers are less explored. In this study, global news data are leveraged to construct a novel global conflict index (GCI), which integrates multisource datasets to comprehensively characterize the key drivers of terrorist attacks. TerrorXG is proposed to predict terrorist attacks, and SHAP analysis is applied to quantitatively interpret the importance and contributions of the driving factors. TerrorXG demonstrated superior performance (RMSE: 0.319; PCC: 0.777) and high computational efficiency. Compared with the second most influential factor (population size), the proposed GCI has a 42.4% greater impact on terrorist attacks. The interpretability analysis of the model highlights socioeconomic inequality as a primary determinant: the impacts of child malnutrition and infant mortality are 38.4% to 108.5% greater than the effect of urbanization. The influence of ethnicity represents only 9.7% of the impact of the GCI, providing empirical evidence that challenges traditional theoretical perspectives on ethnic conflict in terrorism research. This study provides valuable insights for optimizing the allocation of counterterrorism resources.



会议通知 | 2026年中国地理学会春季年会暨中国地理编辑出版年会
“十五五”时期是基本实现社会主义现代化夯实基础、全面发力的关键时期。地理学作为支撑可持续发展的基础性学科,亟需以创新驱动为核心,勇担服务生态文明建设、区域高质量发展及全球治理的重要使命。 在此背景下,为促进地理学高质量发展及其服务能力可持续提升,奠定未来五年的发展基调,**2026年中国地理学会春季年会暨中国地理编辑出版年会**将于**2026年4月24–26日**在**重庆市**隆重举行。本次会议规模预计达**2000人**。 会议旨在充分发挥科技期刊在学科发展中的“方向引领”与“服务支撑”双重作用,搭建高水平学术交流平台。我们诚挚邀请全国地理学及相关领域的科研教学工作者、编辑出版人员及研究生积极参会,共同传播最新研究成果、探索科技前沿,推动地理学理论、技术与方法的创新,促进学术出版与科研创新的深度融合,为地理学在“十五五”开局之年的高质量发展拼出开局之势、干出开局之为。
