Abstract
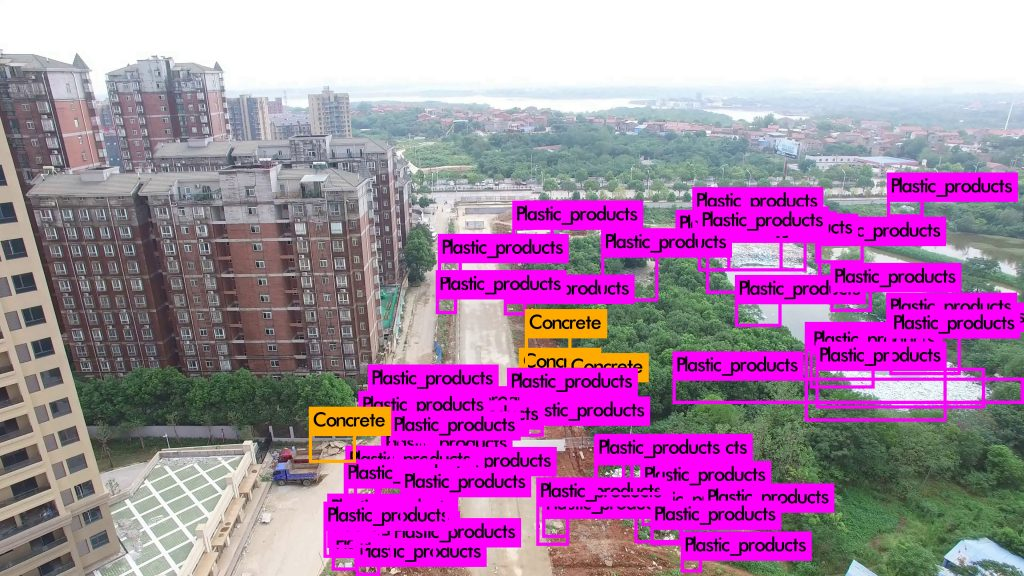
如何准确快速识别城市白色垃圾和建筑垃圾是亟需解决的问题。传统的垃圾识别一般采用人工识别,效率低且成本高。目前对于无人机识别单一微小目标的研究较为缺乏。由于无人机视频数据容量巨大,传统研究存在识别准确率低和效率低等问题。本研究将采用民用无人机拍摄的视频流数据,基于计算机视觉、one-shot深度学习和一类分类算法,建立垃圾快速识别模型。同时完成相关系统的设计开发,实时、快速和准确地获取城市白色垃圾和建筑垃圾分布。
团队成员:孙振辉、李林龙、王思翔
Q.E.D.







![]() UrbanComp
·
·
·
UrbanComp
·
·
·
如何准确快速识别城市白色垃圾和建筑垃圾是亟需解决的问题。传统的垃圾识别一般采用人工识别,效率低且成本高。目前对于无人机识别单一微小目标的研究较为缺乏。由于无人机视频数据容量巨大,传统研究存在识别准确率低和效率低等问题。本研究将采用民用无人机拍摄的视频流数据,基于计算机视觉、one-shot深度学习和一类分类算法,建立垃圾快速识别模型。同时完成相关系统的设计开发,实时、快速和准确地获取城市白色垃圾和建筑垃圾分布。
团队成员:孙振辉、李林龙、王思翔
Q.E.D.
UrbanComp
![]()
![]()
![]()